 ! V$ @( J/ R3 m4 B5 x
! V$ @( J/ R3 m4 B5 x

 % R: n0 o( }9 q& ?+ B
% R: n0 o( }9 q& ?+ B
 9 z! y2 J7 ]3 i4 r
9 z! y2 J7 ]3 i4 r + s! Q& B+ j" A g9 Q" v# X
+ s! Q& B+ j" A g9 Q" v# X / t# Y2 {2 C# S
/ t# Y2 {2 C# S ;
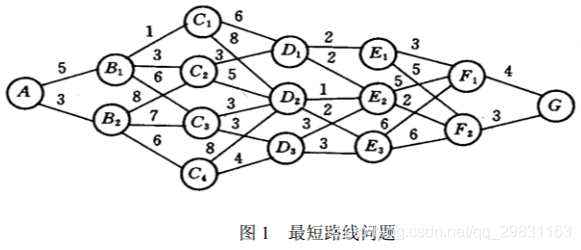
; ;1 y$ d* U0 v$ `8 w1 j(i)=@min(road(j,i)(j)+D(j,i)));! T* E3 g3 i: c3 L% f& q
;1 y$ d* U0 v$ `8 w1 j(i)=@min(road(j,i)(j)+D(j,i)));! T* E3 g3 i: c3 L% f& q
 - ^/ u0 l, h/ ~5 u" X
- ^/ u0 l, h/ ~5 u" X % Z) ?% }" s+ j2 |( M9 B
% Z) ?% }" s+ j2 |( M9 B
 % ?3 X( P4 O' j) W
% ?3 X( P4 O' j) W : v9 G6 P. N2 h
: v9 G6 P. N2 h . k4 ^; R0 o* p) S. T
. k4 ^; R0 o* p) S. T * A5 L: J! x7 u) x$ `) I9 D% a
* A5 L: J! x7 u) x$ `) I9 D% a| 欢迎光临 数学建模社区-数学中国 (http://www.madio.net/) | Powered by Discuz! X2.5 |